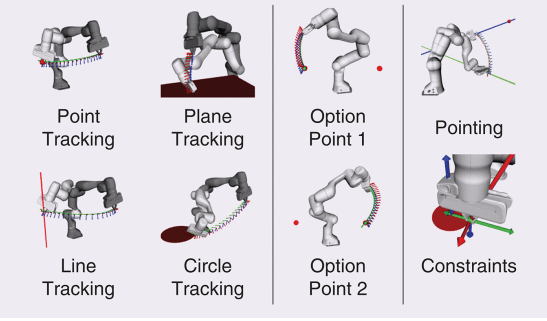
GAFRO
Geometric Algebra Software Toolbox for Robotics
Tactile Generation and Gesture Recognition
Algorithms for Tactile Data Generation and Gesture Recognition
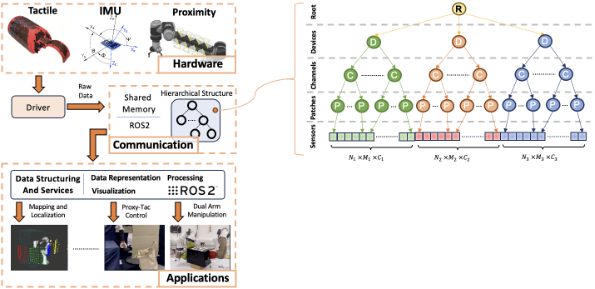
Middleware
The nevious system for robots equipped with heterogeneous sensors
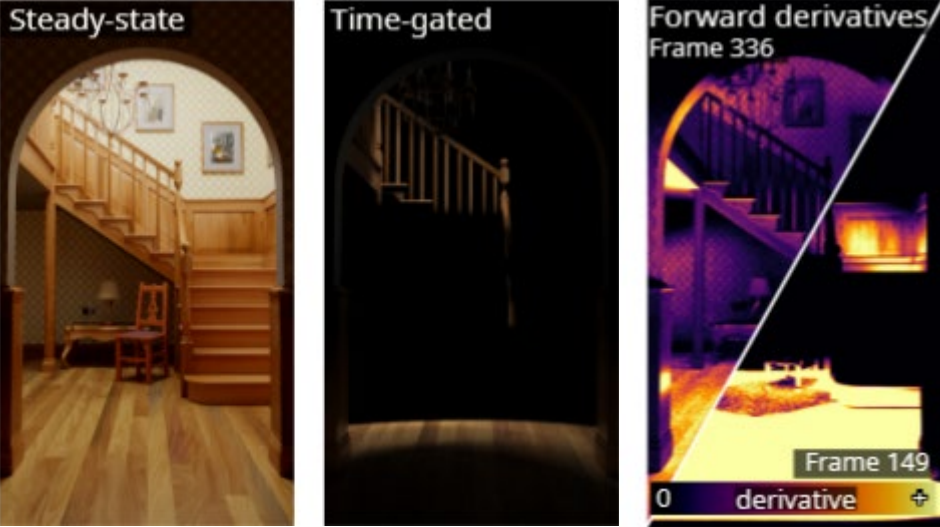
mitransient
Virtual Optics Lab
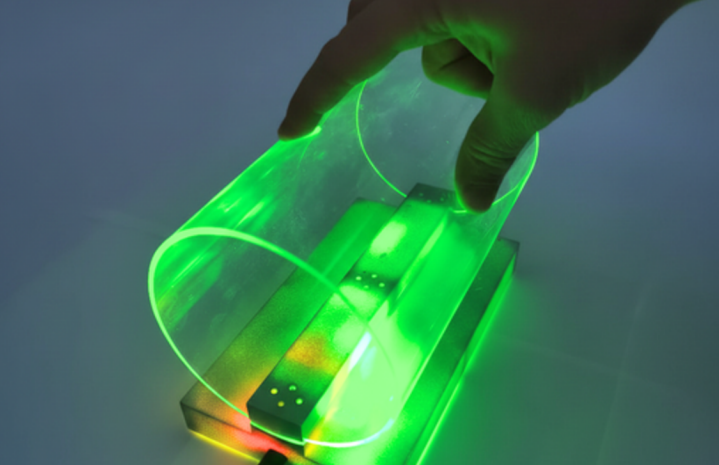
OptoSkin
Novel LIDAR Touch Sensors for Detection of Touch and Pressure Within Wave Guides
Printed electronic skin
Capacitive tactile sensor arrays screen printed on flexible substrates
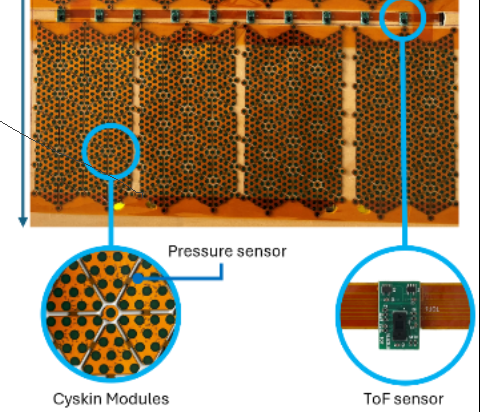
ProxySkin
Multi-modal skin for robot-centric tactile and proximity perception
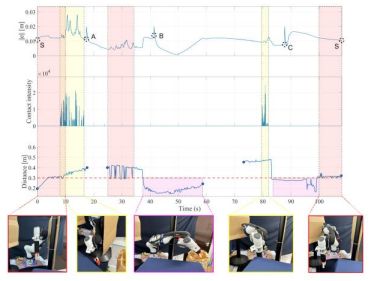
Proxy-tactile Reactive Control
Algorithms for Safe, Sensor-Driven Manipulation in Cluttered Environments
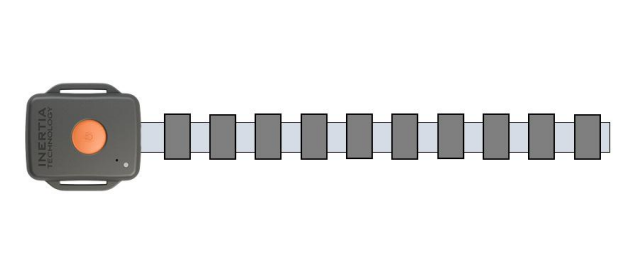
ProMove-ToF
High-speed low-power wireless ToF devices.
Use Case 1
COBOT-Worker cooperative assembly
Use Case 2
Dual arm handling of large objects
Use Case 3
Agricultural harvesting via wearable devices and collaborative mobile manipulators