Proxy-tactile Reactive Control
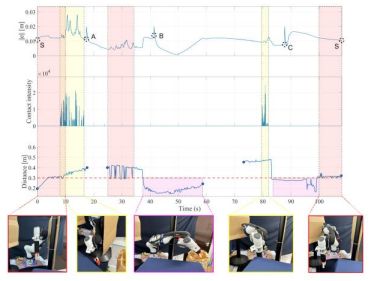
Proxy-tactile Reactive Control is a real-time control algorithm that integrates proximity sensing and tactile feedback to allow robots to operate safely in unknown, cluttered and contact-rich environments.
The controller uses distributed Time-of-Flight (ToF) sensors to detect and avoids nearby obstacles before impact, while distributed tactile sensors manage and minimize forces when contact is unavoidable.
Features
- Combined proximity + tactile feedback for proactive and reactive safety
- Task-priority control structure balancing contact minimization, trajectory tracking, and obstacle avoidance
- Fully reactive: no prior environment model required
- Handles unexpected collisions robustly
- Compatible with standard distributed tactile sensors technologies and low-resolution ToF arrays
- Proven to reduce collision time and improve operational speed in experiments
Videos
A Proxy Tactile Reactive Control For Robots Moving In Clutter.
ToF self-localisation.
ToF scene estimation.